




Hangfa Compass Q2 Robot Platform
-
Detail
Description
- Move to all the directions
- Overall aluminum casting & molding process
- Coreless DC servo motor
- Servo driver included
- Demo application source code based on STM32F407
- Four wheels can move independently
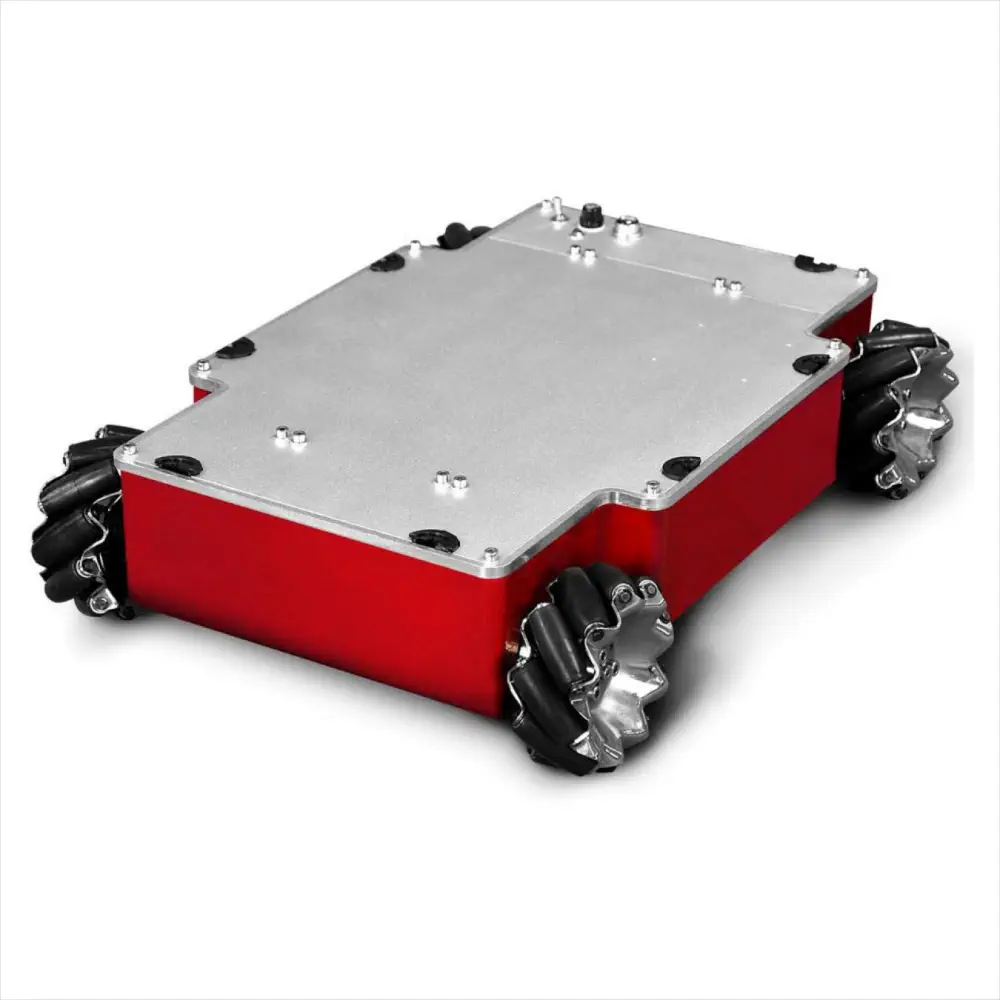
The Hangfa Compass Q2 Robot Platform is a small fundamental robot platform. It aims to provide users with a complete mobile robot system with high reliability and multiple interfaces. Compass Q2 is a robot platform with four 45 degrees QMA-10 omni wheels. Compared with the traditional gear train. the QMA-10 omni wheel is able to accomplish many special movements. like translation. rotation. and simultaneous translation & rotation.

The chassis of this platform adopts overall aluminum casting & molding process. Compass Q2 uses four high-power coreless motors as the driver. equipped with four-axis servo driver. supporting both CAN bus and RS232 interface. The development kit provides customers with a complete equipment communication protocol. and also provides examples and demo application source code based on STM32F407. which allows users quickly know how to operate Compass Q2.
- 4x HFmotor-3230 (30W) coreless DC servo motor
- 1x RHF407 development board
- 4x QMA-10 omni wheel
- 5x ULB-1 ultrasonic range-finding sensors
- 1x IMDR4 servo driver

PDF File
- Hangfa Compass Q2 Dimensions
- Hangfa Compass Q2 User Manual V1.2
- Body Structure: aluminum alloy molding whole shape
- Driving Wheel: QMA-10 omni wheel
- Drive Mode: four-wheel independent drive
- Minimum Space Between Robot To Ground: 22.5mm
- Rated Load Capacity: 20kg
- Rated Power Of The Motor: 30W
- Quantity Of Motors: 4
- Maximum Translational Speed: 1.2m/s
- Minimum Turning Radius: 0m
- Typical Duration Time: >10h(load capacity 10KG.moving speed 1m/s. moving rate70%)
- Support Electricity Output: 5V@5A / 12V@5A /battery voltage(35.2~46.2V)@>10A
- Battery Capacity: 24V/18.2Ah lithium-ion battery
- Battery Charger: charger input voltage:AC100V~240V Charging current:5A Interface: direct plug-in
- Accessories: battery charger、ULB-1ultrasonic sensor×5
- Dimension: 450×330×115mm
- Diameter Of Driving Wheel: 101.6mm
- Suspend Kind rocker arm suspension
- Gross Weight: 9.2kg
- Motor Type: coreless DC servo motor
- Motor Encoder: 500 line/rev. A、 B phase output
- Motor Driver: servo driver. supporting both CAN bus and RS232 interface
- Maximum Rotation Speed: 215°/s
- Adaptive Ground: indoor. bituminous ground .concrete ground with little depression
- Standby Time: >30h
- The Default Specification Of The Power of Insurance Tube: 5×20/20A
- Battery Fast Change: support
Application & Research
- Pattern recognition technology research
- Electronic engineering experiment
- Carrying and storage applications
- Route planning technology research
- Mechanical engineering experiment
- Monitoring and investigation application
- Automatic driving technology research
- Embedded system development and experiment
- The robot competition
- Sensor technology research
- Image process technology research
- Mapping application
- Artificial intelligence research
- Multi-robot cooperation technology research
- Flexible manufacture system application
-
Customer ReviewsNo comments