





ROBOTIS HAND RH-P12-RN Robotic Hand
-
Detail
Description
- ROBOTIS HAND RH-P12-RN Robotic Hand
- Offers a 1-DOF Two-Finger hand
- Adaptive gripping design
- Lightweight and high power
- Detachable fingertips
- Intuitive and simple mounting
- Network Interface: RS-485
The ROBOTIS HAND RH-P12-RN Robotic Hand offers a 1-DOF Two-Finger hand. It is a lightweight and high-power robotic hand. It uses an improved firmware version compared to RH-P12-RN. It has a similar control table structure to DYNAMIXEL-PRO(A) and DYNAMIXEL-P series.
DOF Two-Finger Hand: Multi-functional robot hand with 2 fingers powered by a 10W DC motor.
Adaptive Gripping Design: Passive Joints enable adaptive gripping for various shapes of objects.
Current Control (Force Control): Torque control and current-based position control make it possible to pick up objects of various materials.
Light Weight & High Power: a 5 kg high payload is delivered from a 500g light weighted robot hand.
Detachable Finger Tips: Detachable fingertips can be easily replaced with customized fingertips.
Intuitive and Simple Mounting: The robot band can be quickly mounted on a ROBOTIS Manipulator. Simplified design enables easy mounting on custom applications.
Dynamixel 2.0 Protocol: The robot hand supports DYNAMIXEL 2.0 protocol for easy control. Power and communication are connected via DYNAMIXEL BUS.
- 1x ROBOTIS HAND RH-P12-RN Robotic Hand
Size
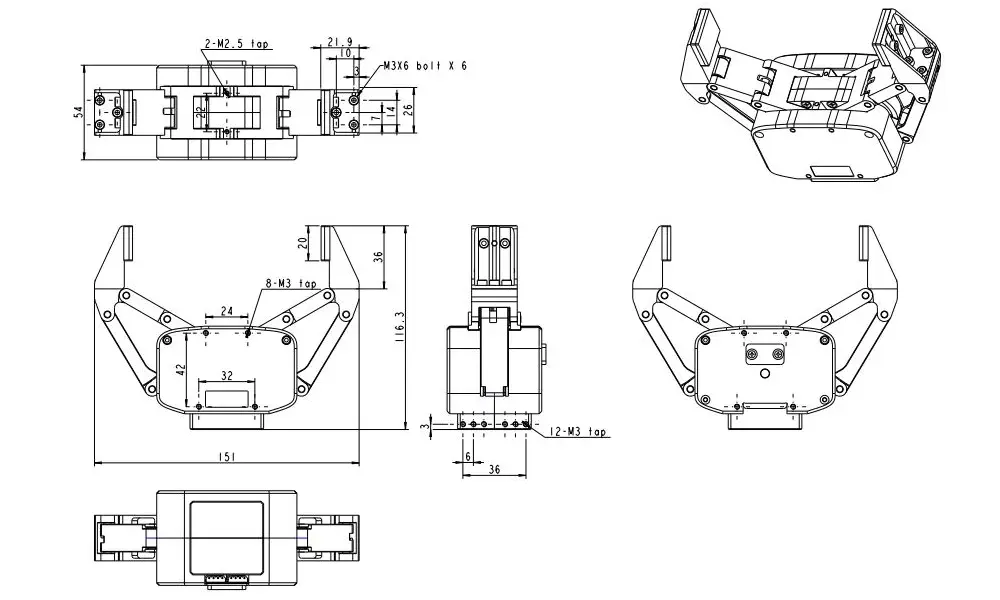
- 151 x 116.3 x 54 mm (L x W x H)
Website
- ROBOTIS HAND RH-P12-RN Robotic Hand - Manual
- Gear Ratio: 1181:1
- MCU: ST CORTEX-M4
- Stroke: 0 - 106 mm
- Motor: Coreless
- Material: Full Metal Gear. Metal Body
- Baud Rate: 9.600 bps ~ 10.5 Mbps
- Control Algorithm: PID Control
- Degree of Precision: 0.088°
- Maximum Gripping Force: 170 N
- Recommended Payload: 5 kg
- Operating Temperature: -5 ~ 55 °C
- Nominal Voltage: 24 V
- Standby Current: 30 mA
- Network Interface: RS-485
- Operating Mode: Current Control Mode | Current-based Position Control Mode
- Position Sensor: Contactless Absolute Encoder (12-bit. 360°)
- Command Signal: Digital Packet
- Protocol Type: RS485 Asynchronous Serial Communication (8bit. 1stop. No Parity)
- Physical Connection: RS485 Multidrop BUS
- Feedback: Position. Velocity. Current. Temperature. Input Voltage. etc.
- Weight: 500 g
-
Customer ReviewsNo comments