





Pickerbot Mini Xavier
-
Detail
Description
- Pickerbot Mini Xavier
- Mobile Pick-and-Drop Robot with Omnidirectional Mecanum Wheels
- Compatible with ROS1/ROS2
- Offers various ROS Computer Options: Jetson Nano. TX or Xavier
- Includes a built-in Robot Arm. Soft Gripper. LiDAR. and Depth Camera
The Pickerbot Mini Xavier is a mobile pick-and-drop robot based on ROS (Robot Operating System) designed for robotic researchers. developers. educators. students. and hobbyists.
Equipped with a built-in ROS Computer. 3 Axis Robot Arm. Soft Gripper. LiDAR. Depth Camera. STM32 Motor/Power/IMU Controller. and a metal chassis with omnidirectional mecanum wheels. the Pickerbot Mini offers a compact and ready-to-go package at an affordable price. It is an ideal choice for ROS beginners and serves as a prototype platform for robotic research and development projects.
Why ROS?
ROS is the most popular robot operating system in the world. By using a hardware platform based on ROS. users can gain extensive practical skills from the world's most promising robot operating system.
Quick Start
The Pickerbot Mini comes pre-loaded with ROS and Ubuntu images. which include all the essential ROS software packages and drivers. Our online tutorial will guide users on how to launch the Pickerbot Mini and its ROS packages within minutes.
Complete Solution
The Pickerbot Mini is a complete package for ROS learning and research projects. It is bundled with all the essential hardware components and ROS software.
Expandable
The Pickerbot Mini is expandable. allowing users to add accessories such as voice recognition modules. LCD screens. and external keyboards.
Classroom Ready
The Pickerbot Mini comes with comprehensive classroom materials. including a user manual. tutorials. and sample ROS codes. This allows educators to easily integrate the Pickerbot Mini's hardware and software package into their curriculum with flexibility.
Key Functions:
Computer Vision
- OpenCV
- KCF tracking
- AR label recognition
- RGB visual line tracking
- Skeleton tracking
- 3D object recognition
- ORB mapping
SLAM & Navigation
- Obstacle avoidance
- rtab visual mapping
- rtab visual+LiDAR mapping
- Gmapping
- Hector mapping
- Karto mapping
- Cartographer mapping
- Cartographer 3D Reconstruction
- RRT path planning
- LIO-SAM 3D Reconstruction
- LeGO-LOAM 3D Reconstruction
Deep Learning
- YOLO object recognition
- YOLO gesture recognition
- YOLO traffic sign recognition
- Deep learning model training
- Gesture control
- Tensorflow object recognition
- Tensorflow target detection
- Tensorflow handwritten number recognition.
Hardware:
1x ROS Computer (Jetson Nano)
1x Robot Arm and Soft Gripper
1x Mecanum Wheel Chassis
1x Depth Camera
1x LiDAR
1x Battery
1x Battery Charger
Software:
1x Onboard Ubuntu. ROS1. and STM32 Driver (User can install ROS2 on a new SD card or replace the original ROS1 on the bundled SD card)
1x Drivers and Software Installers
1x ROS Packages and Source Codes
1x STM32 driver
1x iOS and Android Remote Control Apps
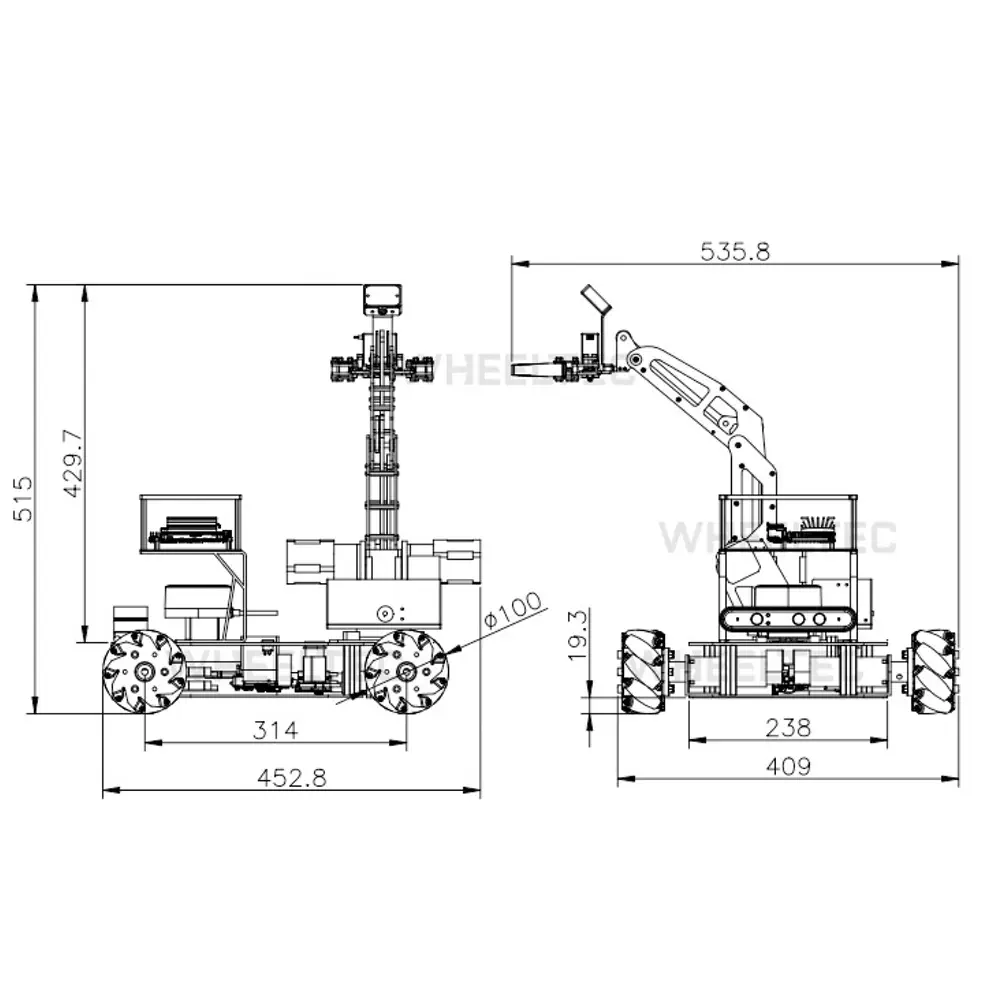
Length: 40cm
Width: 38.7cm
Height: 15cm
ROS Controller - Jetson Nano
Orbbec Depth Camera
Leishen LiDAR
Omnidirectional Mecanum Wheels - 100 mm Diameter
Servo Power - 35W
Robot Arm - 3-xis
Soft Gripper
-
Customer ReviewsNo comments